1.はじめに
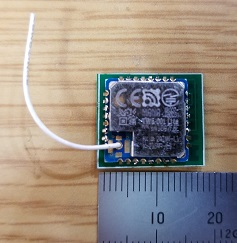
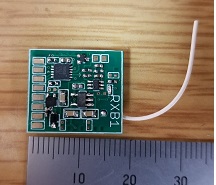
2.4GHz帯の無線モジュールTWELITEを使ったインドアプレーン用超小型、超軽量ラジコン受信機です。(対応する送信機は
TXA0です。)
動力用モータ・ドライバを1ch、操作チャンネル2ch、デジタル出力1chを実装しています。
基本的には、マグネットアクチュエータ駆動用ですが、サーボ信号出力に変更することも可能です。
また、エレボン機やVテール機にも対応できるようにミキシング機能も盛り込みました。
軽量化のために、受信アンテナは、マッチ棒アンテナから電線に変更し、基板も0.2mm厚で制作しました。
2.機能
●ラジコン受信機
●マグネットアクチュエータ出力 : 2ch
●サーボ信号出力 : 2ch
●ミキシング機能
●モータ出力 : 1ch
●デジタル出力 : 4ch(基板上にはトランジスタ出力1chのみ実装)
3.仕様
●入力電源電圧 : 3.0V~4.2V (Li-Po:1セル専用)
●回路消費電流 : 20mA
●オートカット電圧 : 3.1V
●モータ電流 : 2.0A max
●マグネットアクチュエータ電流 : 0.4A max
●デジタル出力 : 100mA max
●基板外形 : 18*16*4(縦*横*高さ)
●重量 : 1.2g
4.回路図(MD1の端子名はデバイス本来の名称で記載しています。)
5.部品表
| 部品番号 |
部品名 |
仕様 |
メーカー |
備考 |
| MD1 |
無線モジュール |
TWELITE-001 |
モノワイヤレス |
BLUE |
| IC1 |
3端子レギュレータ |
TAR5SB33 |
東芝 |
|
| IC2 |
2ch フルブリッジドライバ |
A3901 |
Allegro |
|
| IC3 |
レベルシフター |
SN74LVC1T45 |
TI |
|
| Q1 |
MOSFET |
SSM3K104TU |
東芝 |
|
| Q5 |
抵抗内蔵トランジスタ |
RN1105 |
東芝 |
|
| D1 |
ショットキー・バリア・ダイオード |
BAT60A |
Infinien |
|
| LED1 |
LED |
SML-LX0402SIC |
LUMEX |
赤色 |
| C1 |
チップセラミックコンデンサ |
10uF/6.3V |
|
|
| C2 |
チップセラミックコンデンサ |
10uF/6.3V |
|
|
| C3 |
チップセラミックコンデンサ |
10uF/6.3V |
|
|
| C4 |
チップセラミックコンデンサ |
0.1uF/25V |
|
|
| C5 |
チップセラミックコンデンサ |
0.1uF/25V |
|
|
| C6 |
チップセラミックコンデンサ |
0.1uF/25V |
|
|
| C7 |
チップセラミックコンデンサ |
0.1uF/25V |
|
|
| C8 |
チップセラミックコンデンサ |
10uF/6.3V |
|
|
| C9 |
チップセラミックコンデンサ |
0.1uF/25V |
|
|
| R1 |
チップ抵抗 |
10kΩ |
|
|
| R2 |
チップ抵抗 |
10kΩ |
|
|
| R3 |
チップ抵抗 |
10kΩ |
|
|
| R4 |
チップ抵抗 |
100kΩ |
|
|
| R5 |
チップ抵抗 |
100kΩ |
|
|
| R6 |
チップ抵抗 |
470Ω |
|
|
6.プログラム
ソースリスト
rxb1_20220911.c
オブジェクト・コード(バイナリファイル)
rxb1_20220911.bin
7.配線
配線は下図を参照してください。
8.説明
8.1 LEDについて
回路上にあるLED1は、電源投入後2~3秒間隔で点滅しますが、ペアとなっている送信機からの電波を正常に受信すると点灯します。
8.2 バインド(ペアリング)
本システムでは、プログラム上で送信機と受信機の周波数チャンネルとアプリケーションIDを直接書き込んでいるので、バインドさせる操作は不要で、電源ONで即動作します。
本システムを同時に複数使用すると混信してしまいますが、混信を避けるには、プログラム上のRX_CH(周波数チャンネル)を別のチャンネルに変更します。RX_CHは11から26まで選択できます。
また、RX_ID(アプリケーションID)を変えても混信を避けることができます。RX_IDは、16進で0~Fの任意の16文字で設定します。
RX_CH、RX_IDを変更した場合は、送信機のTX_CHとTX_IDも同じ値に変更してください。
8.3 デジタル出力
デジタル出力は4chで、そのうち1chのみトランジスタによるドライブ出力を実装しており、LEDなどを簡単にON/OFFさせることができます。
LEDを点灯させる場合は、220Ω~330Ω程度の抵抗を直列挿入するのを忘れないでください。
デジタル出力の2ch~4chは、それぞれDIO8(10pin)、DIO4(6pin)、DIO19(4pin)に対応しています。
8.4 サーボ信号出力について
本回路は、マグネットアクチュエータ駆動用になっていますが、サーボ信号出力に変更することができます。
サーボ信号に変更するには、ジャンパー(JP1)をショートさせます。
サーボ信号出力は下図を参照してください。
8.4 ミキシング
Vテール機やエレボン機では、ミキシング機能が欲しくなります。
通常のラジコンシステムでは送信機側でミキシング信号を作り出しますが、本システムでは受信機側でミキシング信号を作り出しています。
ミキシングを有効にする場合は、ジャンパー(JP2)をショートさせます。
ミキシングの方向は、Vテールとエレボンでは異なりますし、サーボの回転方向も含めるとミキシングの方向は、全部で16パターンあります。
ミキシング方向の変更方法
1⃣送信機の電源をONする。
2⃣送信機のCH1の信号を1.75msec以上にする。(具体的には、ラダースティックを右いっぱいに倒す)
3⃣受信機の電源をONして5秒以上待つ。
以上でミキシング方向を変更することができます。
ミキシング方向は、全部で16パターンあるため、目的とするミキシング動作になるまで、上記の設定を繰り返します。
最悪でも16回繰り返せば、目的とするミキシング動作になるはずです。
ミキシング機能は、マグネット・アクチュエーター、サーボどちらの設定でも有効です。
ミキシング量は50%固定です。
8.5 サーボリバース
マグネットアクチュエータの動作方向を反対にする場合は、マグネットアクチュエータに接続する2本の線を入れ替えれば良いのですが、サーボの場合はそうはいきません。
サーボの回転方向のパターンはCH1、CH2の2チャンネルがありますので、組み合わせとしては全部で4パターンあることになります。
回転方向変更方法は、上記8.4のミキシング方向変更と同じです。
全4パターンありますから、目的のサーボ回転方向になるまで繰り返します。
前述したようにマグネットアクチュエータでは、このリバース機能は特に必要はありませんが、サーボと同じようにマグネットアクチュエータでも動作方向を変えることができます。
8.6 エンコンスティック位置の変更
エンコンスティックのモータONポイントは、エンコンスティック中央に設定していますが、モータONポイントをエンコンスティック中央よりも下方に変更することができます。
ジャンパー(JP3)をシュートさせると、モータONポイントがエンコンスティック中央よりも下方に移動します。