1.はじめに
ステッピングモータを使った超小型サーボモータです。
以前制作した
LS10と動作原理は同じものですが、LS10には致命的な問題がありました。それは、リードスクリュー方式のため、
樹脂ナット部分が可動端に達したときに噛み込みによってロックしてしまうことです。
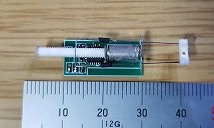
このロック問題を解決するために、ネジ部分を細いステレス線で上下から挟み込む構造としてみました。
挟み込みが強すぎるとモータが回らなくなり、挟み込みが弱すぎるとネジが空回りしてしまうため、調整は難しいです。
推力は、とても弱く、1円玉をやっと持ち上げられるくらいしかありませんので、全備重量10gクラスのRC飛行機用です。
本システムは、直動サーボと同じ動作をしますが、オープンループ制御のため、厳密にはサーボモータではありません。
2.機能
●直動式アクチュエータ
3.仕様
●入力電源電圧 : 3.0V~4.2V (Li-Po:1セル専用)
●PUSH/PULL力 : 1.2gf
●フルストローク : 8mm
●回路消費電流 : 70mA
●基板外形 : 20*8*6(縦*横*高さ)
●重量 : 0.9g(コネクタ含まず)
4.回路図
5.部品表
| 部品番号 |
部品名 |
仕様 |
メーカー |
備考 |
| IC1 |
マイコン |
ATtiny44A_20M1 |
Micro Chip Technology |
|
| C1 |
チップセラミックコンデンサ |
1uF/10V |
|
|
| R1 |
チップ抵抗 |
10kΩ |
|
|
| R2 |
チップ抵抗 |
1kΩ |
|
|
| motor1 |
ステッピング・モータ |
Φ4 , L=8mm , 61Ω/相 |
|
|
6.プログラム
自作する場合は、マイコンにプログラムを書き込む必要があります。
下記ファイルをダウンロードしてマイコンへの書き込みを行ってください。
LS110.hex
7.配線
8.動作説明
電源が投入されると、ネジの端までステッピングモータが一方方向に回転し、位置決めを行います。
その後、入力パルス信号に応じた位置に移動します。
注意点として、直動位置検出を行っていないため、動作が拘束されると位置ずれが発生し、この位置ずれは電源がオフするまで続きます。
回路上のジャンパー(JP1)をショートさせるとリバースモードになります。(写真ではJP1がネジ部の下のために見えません)
9.動画
https://youtu.be/SCEn0DEGhcI