1.概要
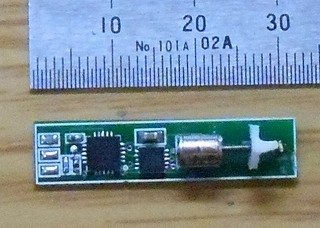
小型カメラのレンズフォーカスかズーム用だと思われますが、小型のステッピングモータを入手できたので、超軽量のサーボモーターを製作してみました。
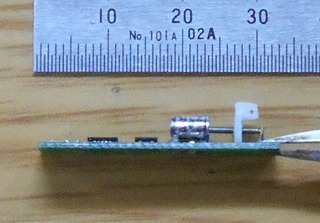
もともとのモーター軸がM1のボルト状になっていて、そこにナットをはめ込んだ構造で、モーターが回転するとそれに沿ってホーン付きナットがスライドします。
電源投入時にモーターを一定方向にフルストローク以上回転させ、ナットを端に突き当て動作を行い、初期の位置設定を行います。
その後の動きは直動タイプのサーボと同じですが、フィードバック制御ではなくオープンループ制御のため、厳密にはサーボモーターとは言えません。
2.機能
●直動式アクチュエータ
3.仕様
●適応バッテリ Li-Po:1セル
●push/pull力:2gf
●フルストローク:4mm
●消費電流 :150mA(動作時)
●外形 7*31*7(縦*横*高さ)
●重量 0.7g
4.回路図
5.部品表
| 番号 |
部品名 |
品番 |
仕様 |
メーカー |
備考 |
| IC1 |
マイコン |
ATtiny44A_20M1 |
|
ATMEL |
|
| IC2 |
モータードライバー |
A3901 |
|
Allegro |
|
| R1 |
チップ抵抗 |
|
10kΩ |
|
|
| R2 |
チップ抵抗 |
|
1kΩ |
|
|
| C1 |
チップセラミックコンデンサ |
|
0.1uF/10V |
|
|
| C2 |
チップセラミックコンデンサ |
|
4.7uF/10V |
|
|
6.マイコンプログラム
自作する場合は、マイコンにプログラムを書き込む必要があります。
下記ファイルをダウンロードしてマイコンへの書き込みを行って下さい。
LS102.hex
lock : 0xFF
fuse : 0xFF,0xDE,0x62
7.配線図
配線は、下図を参照してください。
8.感想
力不足でモーターが脱調してしまうと位置ずれが発生します。これについてはオープンループ制御のため、致し方ありません。
力に余裕があれば、あまり問題にはなりませんが、このモーターは、1円玉2個持ち上げるのがやっとですし、ストロークも±2mmしかありません。
駆動部分がネジ式のため、ナットが端に突き当たると締め付けてしまい、ロックしてしまうこともありました。
モーターの発熱も大きく、連続動作させると触れないくらい熱くなります。
まだまだ問題点が多く、改良の余地がありそうです。
9.動画
https://youtu.be/I3qo4iyel54
https://youtu.be/89Fm016T9P4