1.概要
船舶模型で使われるバウ・スラスター用のモータ駆動回路で、送信機のスティック操作でDCモータを正転/逆転、停止させることができます。ニュートラル付近ではモータはオフしていますが、送信機のスティックを操作するとモータを正転/逆転させることができます。モータを回転させるときにパワー可変領域を設けてあるので、この領域ではスピコン的な動作をします。要するに、遊び(ニュートラル部分)が大きいバック付きDCモータ用スピードコントローラです。スイッチ素子にはFETを使っています。
2.機能
●FET正逆反転スイッチ
3.仕様
●動力用電源電圧 4.8〜12V(リポ2〜3セル、NiCd/NiMh4〜10セル)
●負荷電流 10A (連続)
●ON抵抗 8mΩTYP
●制御用電源電圧 3.0〜6.0V(受信機から供給)
●消費電流 0.8mA (制御用電源)
●基板外形 26*22*5(縦*横*高さ)
●重量 5.3g(コネクタ含む)
4.回路図
5、部品表
| 部品番号 |
部品名 |
仕様 |
メーカー |
備考 |
| IC1 |
マイコン |
ATtiny45 |
Microchip Technology |
|
| Q1〜Q5 |
抵抗内臓トランジスタ |
RN1102 |
東芝 |
|
| Q6〜Q7 |
FET |
HAT1072H |
ルネサス・エレクトロニクス |
|
| Q8〜Q9 |
FET |
HAT2164H |
ルネサス・エレクトロニクス |
|
| C1 |
セラミック・コンデンサ |
0.68uF/16V |
|
|
| C2〜C4 |
セラミック・コンデンサ |
0.1uF/25V |
|
|
| R2〜R3 |
抵抗 |
1.0kΩ |
|
|
| R4〜R5 |
抵抗 |
2.2kΩ |
|
|
6.マイコンプログラム
自作する場合は、マイコンにプログラムを書き込む必要があります。
下記ファイルをダウンロードしてマイコンへの書き込みを行って下さい。
(右クリックで ”対象をファイルに保存” を選択)
rs601.hex
lock : 0xFF
fuse : 0xFF,0xFDS,0x62
7.配線図
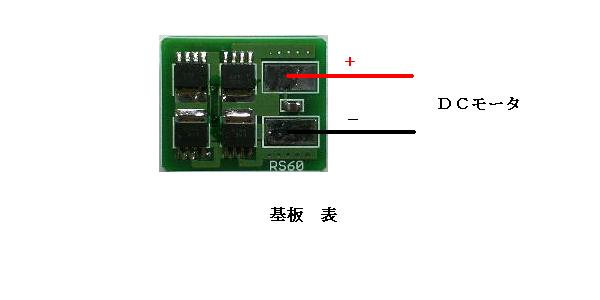
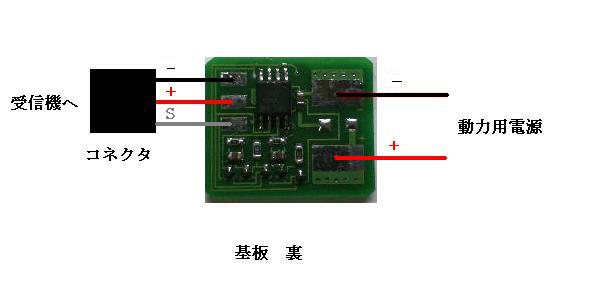
8.使い方
配線は完了していれば、すぐに動作可能です。
送信機のスティックが中央付近にあるときはモータは停止していますが、スティックを傾けていくとあるところからモータが回転を始め、傾きを増すほどモータの回転数は上がります。通常の送信機の設定でしたら、スティックをいっぱいに切るとモータは最大パワーで回転します。スティックを倒す方向でモータの右/左の回転方向が変わります。
制御回路部の電源は受信機から供給されていて、受信機をOFFすればモータも停止します。この状態では、モータ駆動回路に電流は流れませんので、動力用電源を接続したままでも大丈夫です。
通常の使用で特に問題になることではありませんが、制御用電源と動力用電源のGNDは内部でつながっていて絶縁されてはいません。(念のため)