 |
1.概要
以前、アヒル型のラジコンを製作しましたが、そのときはスピコンによる速度制御とラダーサーボの組み合わせでした。これでも良いのですが、スクリューシャフトがセンターにあるために、搭載物の中で一番重量があるバッテリーをセンターに積むことが出来ませんでした。そのために左右の重量バランスをとるのに結構苦労しました。
アヒル型ラジコンが好評だったので、第二段として今回、カモ型ラジコンを作ることにしました。
今回は、スクリューを左右に配置し、それぞれ別々のモータでドライブするようにしました。これでバッテリーをセンター置くことができ、重量バランスがとりやすい構造になりました。また、ラダーを省略して、左右2つのスクリューの回転速度差で旋回させる方式としました。右に旋回するときは右スクリューの回転を下げるわけです。この方式だとサーボモータを省略できるメリットもあります。
しかし、モータ制御に問題があります。普通に考えるなら、左右のモータを別々のスピコンでコントロールすればいいのですが、そのためには特殊な送信機が必要です。
私の持っている送信機は下の写真のような2スティックタイプで、左側のスティック(通常スピードコントロール)が上下に動き、右側のスティック(通常ラダー)は左右に動きます。この送信機を改造(右側のスティックを90度回転させて上下に動くようにするなど)して、戦車やブルドーザのコントローラみたいにするのも1つの方法です。
しかし、この送信機は、他の模型のコントロールにも使っているので、改造したくありません。そこで、このような普通の送信機でも2つのモータをコントロールできるスピコンを作ることにしました。
動作としては、右側のスティックがニュートラルの時は、左側のスティックの上下で左右のモータが同じ回転で制御されます。(前進/バック)
左側のスティックを傾けるとスティックの動作量に応じて傾けた側のモータの回転が下がるような動作をします。例えば、左側のスティックを一番上、つまりフルハイにして、右側のスティックを右にいっぱいに切ると左モータは全開になり、右モータは停止し、右に急旋回します。



2.機能
●2モータ速度差制御(高周波PWM方式 )
●バック付き
●BEC付き
3.仕様
●電源電圧 6~12V
●負荷電流 10A (連続)
●BEC電圧 5V
●BEC電流 1A
●消費電流 15mA
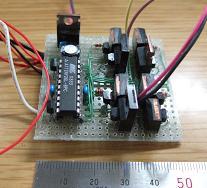
●外形 53*53*20(縦*横*高さ)
●重量 32.5g(コネクタ含まず)
4.回路図
4.部品表
| 部品番号 | 品番 | メーカー | 備考 |
| IC1 | ATtiny26L | ATMEL | . |
| IC2 | TA4805S | 東芝 | . |
| Q1 | RN1202 | 東芝 | . |
| Q2 | RN1202 | 東芝 | . |
| Q3 | RN1202 | 東芝 | . |
| Q4 | RN1202 | 東芝 | . |
| Q5 | RN1202 | 東芝 | . |
| Q6 | RN1202 | 東芝 | . |
| Q7 | RN1202 | 東芝 | . |
| Q8 | RN1202 | 東芝 | . |
| Q9 | RN1202 | 東芝 | . |
| Q10 | RN1202 | 東芝 | . |
| Q11 | 2SK2936 | ルネサス・テクノロジ | |
| Q12 | 2SK2936 | ルネサス・テクノロジ | |
| Q13 | 2SK2936 | ルネサス・テクノロジ | |
| Q14 | 2SK2936 | ルネサス・テクノロジ | |
| Q15 | 2SJ471 | ルネサス・テクノロジ | |
| Q16 | 2SJ471 | ルネサス・テクノロジ | |
| Q17 | 2SJ471 | ルネサス・テクノロジ | |
| Q18 | 2SJ471 | ルネサス・テクノロジ | |
| R1 | 抵抗 1kΩ 1/4W | . | . |
| R2 | 抵抗 1kΩ 1/4W | . | . |
| R3 | 抵抗 1kΩ 1/4W | . | . |
| R4 | 抵抗 1kΩ 1/4W | . | . |
| R5 | 抵抗 2.2kΩ 1/4W | . | . |
| R6 | 抵抗 2.2kΩ 1/4W | . | . |
| R7 | 抵抗 2.2kΩ 1/4W | . | . |
| R8 | 抵抗 2.2kΩ 1/4W | . | . |
| C1 | 積層セラミック・コンデンサ 0.47uF 25V | . | . |
| C2 | 積層セラミック・コンデンサ 0.1uF 25V | . | . |
| C3 | 積層セラミック・コンデンサ 0.1uF 25V | . | . |
| C4 | 積層セラミック・コンデンサ 0.1uF 25V | . | . |
| C5 | 積層セラミック・コンデンサ 0.1uF 25V | . | . |
| C6 | 積層セラミック・コンデンサ 0.1uF 25V | . | . |
| C7 | 積層セラミック・コンデンサ 0.1uF 25V | . | . |
| C8 | 電解コンデンサ 100uF 10V |
5.回路の説明
2スティックタイプ 又はホイールタイプの普通のプロポ送信機で2つのモータ(DCブラシモータ)の速度差制御を行なう回路です。
回路図の”S0”にはラダー制御用のパルス(チャンネル1の信号)を入力し、”S1”にはエンコン制御用パルス(チャンネル2の信号)を入力して下さい。
チャンネルについては、メーカーにより異なるかも知れません。FUTABAの場合は、チャンネル1が操舵で、チャンネル2がエンコンです。
回路図で、モータのところについているコンデンサは、ノイズ防止用のコンデンサです。ノイズによる誤動作防止のために0.1uF/50V程度の積層セラミックコンデンサをモータの近くに実装して下さい。
スイッチは、モータに大きな電流が流れないのであれば、回路図の位置ではなく、バッテリー入力部に直接つけても構いません。
この回路では、左右のモータをそれぞれ異なる方向に回転させること(その場旋回動作)はできませんが、基本的にはスピコンとラダーによる動作と同様の動きを実現できます。
旋回も上の写真のようなスクリュー配置で、十分過ぎるくらい小さな半径の旋回が可能でした。
飛行機用ではないので、バッテリー電圧検知によるモータ・オートカットの機能は設けていません。
また、バッテリー電圧は6Vとなっていますが、12Vでも問題ありません。
6.マイコン プログラムのダウンロード
自作する方は、マイコンにプログラムを書き込む必要があります。
圧縮形式ですので、下記ファイルをダウンロードした後、解凍してHEXファイルにしてからマイコンへの書き込みを行って下さい。
書き込みを行う際に、プログラムメモリの最終番地(0x3FF)のローバイトに8MHzOSCキャリブレーションデータを書き込んで下さい。
※注意 プログラム書き込みには高電圧パラレルライタが必要です。
mb105.zip
設定
・FUSE bit high (10101100B)
・FUSE bit low (10100100B)
RSTDISBL:0
SPIEN:0
EESAVE:1
BODLEVEL:1
BODEN:0
PLLCK:1
CKOPT:0
SUT1:1
SUT0:0
CKSEL3:0
CKSEL2:1
CKSEL1:0
CKSEL0:0
・LOCK bit (11111111B)
LB1:1
LB2:1
7.1使い方(初期設定方法)
本回路は、実際にスピコンとして動作させるために、初期設定する必要があります。この設定は、1度行えば、データは不揮発性メモリに記憶されるためバッテリーを外しても消えることはありません。したがって、通常使用において毎回設定する必要はありません。また、この初期設定は、何度でも変更可能です。
初期設定は、フルバックポジションの設定、フルハイポジションの設定、ニュートラル設定、確認のためのフルバックの順に行います。
①エンコンのトリムは中央にしておきます。
②エンコンのモードは、フタバ製プロポはリバースモードに、それ以外のプロポはノーマルモードに設定し て下さい。
③送信機のスイッチを入れ、エンコン・スティックをフルバックの位置にする。
④スピコンのスイッチを入れて5秒待つ。
⑤右モータからピッと小さな確認音が聞こえたら、 すぐにエンコン・スティックをフルハイ(一番上に上げる)にして5秒待つ。
⑥右モータからピッと小さな確認音が聞こえたら、すぐにエンコン・スティックをニュートラルにして5秒待つ。
⑦右モータからピッと小さな確認音が聞こえたら、すぐにエンコン・スティックをフルバックにして5秒待つ。
⑧5秒後に右モータからピーー(長め)と小さな確認音が聞こえる。
⑨以上で設定終了です。スピコンの電源を切って下さい。
注意事項
設定途中で、モータから確認音がしなかった場合は、設定失敗です。最初からやり直して下さい。 設定をやり直す場合は、スピコン内のマイコンを確実にリセットするために、スイッチオフ時間を3秒以上とって下さい。
スイッチを切るなどして初期設定を途中で中断した場合には、途中までの設定も無効となり、前回の設定値のままで設定変更はなされません。
7.2使い方
初期設定が完了していれば、スイッチをONするだけで、スピコンとして動作します。
8.その他使用上の注意
本回路はスイッチを切ることでスピコン回路、受信機含めて電流は流れませんが、安全のため使用しない時はバッテリーを取り外しておいて下さい。
9.ムービー

どれが本物でどれがRCかわかりますか?
http://www.youtube.com/watch?v=fC_mg2Dk63w