1.はじめに
最近、安価な小型RC飛行機で、動力用モータを機体の左右に2つ搭載し、左右のモータパワーを差動制御することで、機体の旋回を行うものが多くなってきました。
この方式は、ラダーやエルロンを駆動するためのサーボモータが不要となり、コストや重量的に有利と考えられます。
しかし、このシステムを自作したくても2つのモータを差動制御する回路モジュールの適当なものがなく、市販の完成品から差動制御回路を流用する必要がありました。
そこで、このような目的のために2モータ差動制御回路を製作しましたので、紹介します。
2.機能
●2モータ差動制御ESC
●電圧低下検出
3.仕様
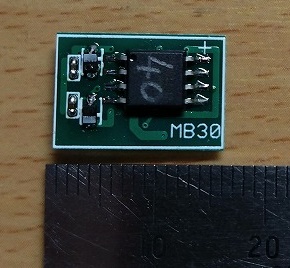
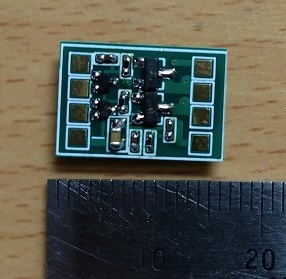
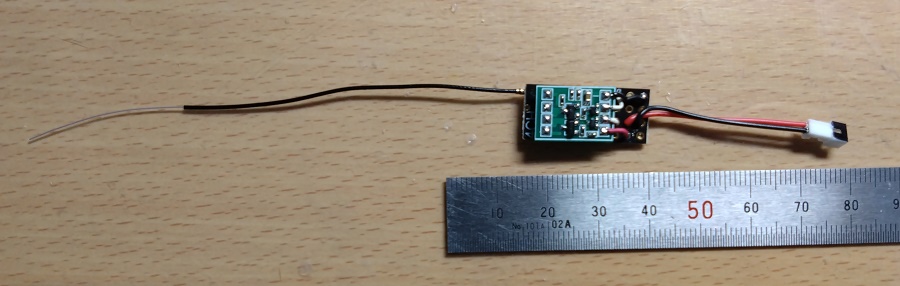
●基板外形 : 15*10.5*3.5(縦*横*高さ))
●電源電圧 : 2.5~4.5V(LiPo 1cell専用)
●重量 : 0.4g
●ESC電流 : 2Amax/ch
4.回路図
5.部品表
| 部品番号 |
部品名 |
仕様 |
メーカー |
備考 |
| IC1 |
マイコン |
ATtiny85V |
MicroChip Technorogy INC. |
|
| Q1~Q2 |
抵抗内臓トランジスタ |
RN1102 |
東芝 |
|
| Q3~Q4 |
Nch MOSFET |
IRLML2502 |
International Rectifier |
|
| D1~D2 |
ショットキー・バリア・ダイオード |
BAT60 |
Infineon Technologies |
|
| C1 |
セラミックコンデンサ |
22uF/10V |
|
|
| C2~C5 |
セラミックコンデンサ |
0.1uF/16V |
|
|
| R1~R4 |
抵抗 |
10kohm |
|
|
6.マイコンプログラム
自作する場合は、マイコンにプログラムを書き込む必要があります。
下記ファイルをダウンロードしてマイコンへの書き込みを行って下さい。
(右クリックで ”対象をファイルに保存” を選択)
MB302.hex
書き込み時の設定
・FUSE 0xFF(Extended_byte)、0x9E(High_byte)、 0x62(Low_byte)
・LOCK 0xFF
7.接続
接続は下図を参照してください。
図中のS(ch1)は受信機からのエルロン信号で、S(ch3)はエンコン(ESC)信号です。
接続例(受信機は、Flysky FS2A-4CH)
8.使い方
本回路は、調整等はありませんが、エルロン・ニュートラル時、左右モータのパワーが異なる場合がありますが、その場合は送信機の
トリムで調整してください。
バッテリーの電圧は3.2V以下になるとモータのパワーが1/3になりますが、モータパワーを一旦OFFポジションにすると
電圧低下検出したことを解除することが出来ます。
しかし、再び電源電圧が低下するとモータ出力が1/3となりますので、電源電圧低下を検出したら直ちに着陸させることを推奨します。
モータの差動による機体制御ですので、モータを停止すると左右のコントロールが出来なくなることに注意してください。